Tükendi
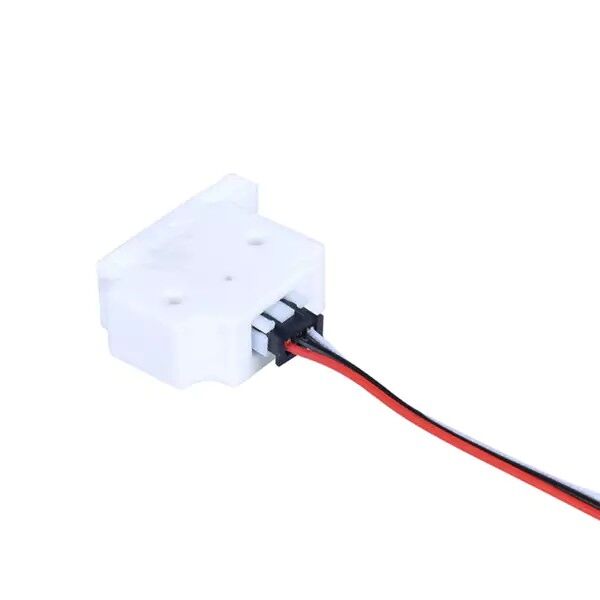
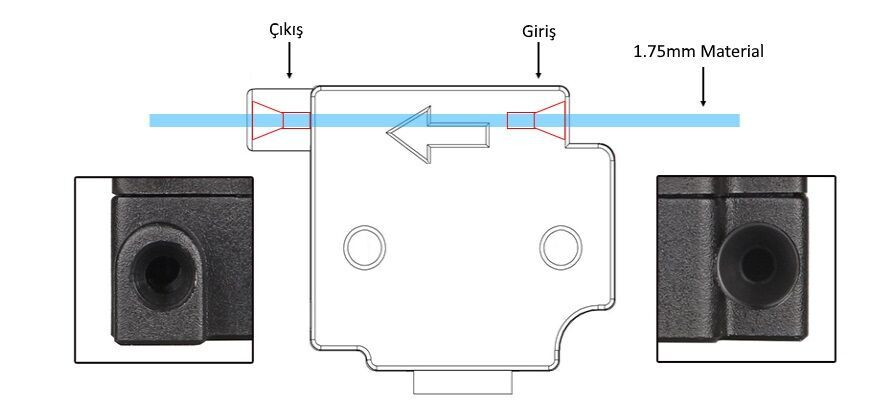
Gelince Haber VerFilament sensörü sayesinde filamentin varlığını ve ayrıca hareketini tespit edebilirsiniz.
Temel olarak, filamentiniz biterse veya filaman kopmuşsa, filament sensör yardımıyla yazdırma işlemini durdurabilirsiniz.
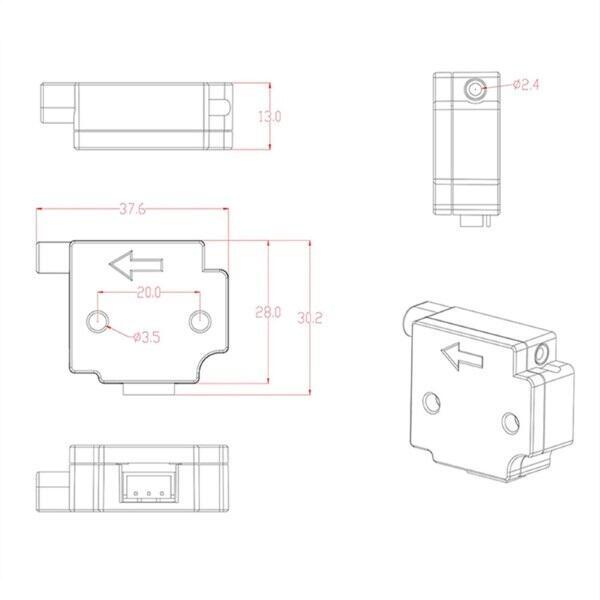
Sensör üzerinde yer alan 3.50mm çapında 2 delik sayesinide ürünü sabitleyebilirisiniz.3D Printer baskısı değildir.Kaliteli plastik malzemeden üretilmiştir.Uzun süreler kullanabilirsiniz.
Üretici yazılımını kurmadan önce, sensöre hangi pimin bağlı olduğunu bilmeniz gerekir.Burada Z_MAX_PIN kullanıyoruz - ki bu RAMPS'de pin 19 ve RUMBA + pin 32'dir. Diğer kartlar için, kullandığınız kartın pins.h dosyasını kontrol etmelisiniz.
Pin numarasını bulduktan sonra, sensör algılama özelliğini etkinleştirmeniz gerekir.Bu burada gösterildiği gibi Configuration.h dosyasında yapılır:
// # FILAMENT_RUNOUT_SENSOR tanımla
#if ENABLED (FILAMENT_RUNOUT_SENSOR)
#define FIL_RUNOUT_INVERTING false // sensörün mantığını tersine çevirmek için true olarak ayarlayın.
#define ENDSTOPPULLUP_FIL_RUNOUT // Sensör tanımlanmışsa, filament aşınması pimleri için dahili çekme kullanmak için.
#define FILAMENT_RUNOUT_SCRIPT "M600"
#endif
Yukarıdaki kodu dosyada bulabilmelisiniz. Özelliği etkinleştirmek için ilk satırdaki komutları kaldırın (başında // kaldırın). Yukarıda gösterildiği gibi INVERTING, RUNOUT ve SCRIPT için varsayılan ayarlar bu sensörlerle mükemmel çalışacaktır.
Daha sonra, kullandığımız pimi tanımlamamız gerekiyor. Önceki bloktan sonra, seçtiğiniz pin'i tanımlamak için satırı ekleyin:
#define FIL_RUNOUT_PIN 19 // 19, RAMPS üzerindeki Z_MAX_PIN için
Bütün blok şu şekilde görünmeli:
#define FILAMENT_RUNOUT_SENSOR
#if ENABLED (FILAMENT_RUNOUT_SENSOR)
#define FIL_RUNOUT_INVERTING false // sensörün mantığını tersine çevirmek için true olarak ayarlayın.
#define ENDSTOPPULLUP_FIL_RUNOUT // Sensör tanımlanmışsa, filament aşınması pimleri için dahili çekme kullanmak için.
#define FILAMENT_RUNOUT_SCRIPT "M600"
#endif
#define FIL_RUNOUT_PIN 19 // 19, RAMPS üzerindeki Z_MAX_PIN için
Etkinleştirdiğiniz diğer ayarlara bağlı olarak, NOZZLE_PARK_FEATURE (Configuration.h) ve ADVANCED_PAUSE_FEATURE (Configuration_adv.h) öğesini bulmanız ve etkinleştirmeniz gerekebilir. Ayrıca bağlı ve etkin bir LCD'ye (baskıyı duraklatmak için) veya EMERGENCY_PARSER etkin (seri olarak duraklatmak için) gerekir.